BROOMBA
The Cinderella of Robots
BROOMBA tirelessly sweeps the crumbs onto the floor where hopefully, you also have a robot vacuum cleaner!
Construction
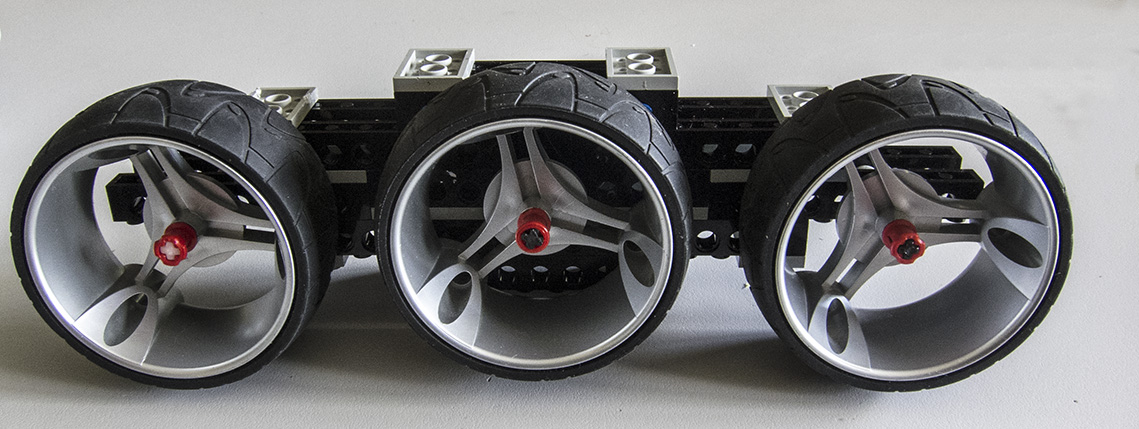
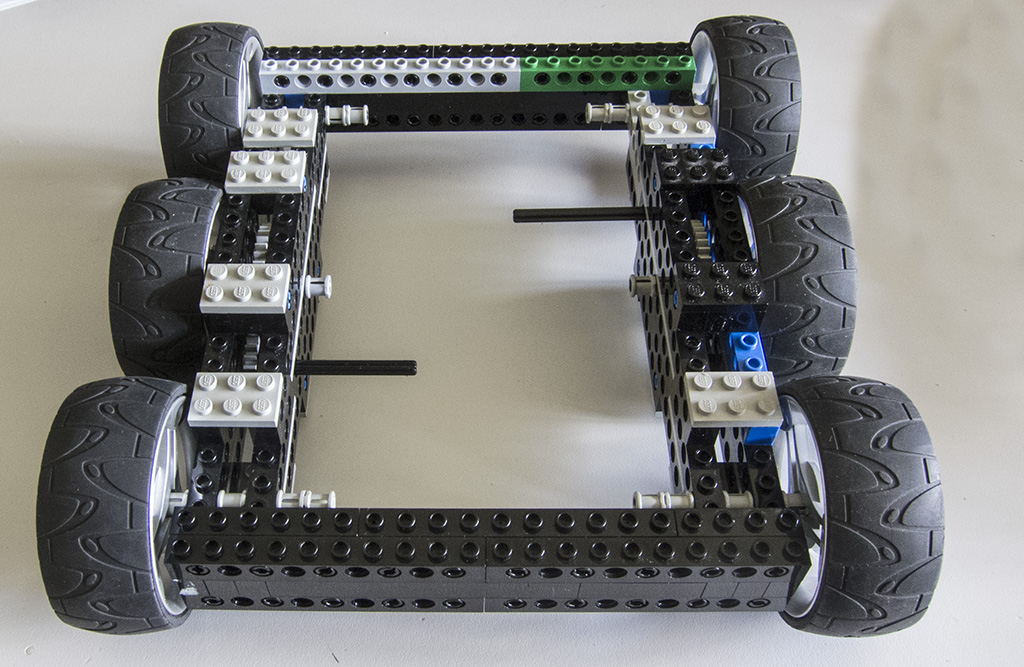
The chassis has two bogies, each carrying three wheels. The middle one is a bit lower than the others, so the middle one takes all the weight and the robot can spin easily.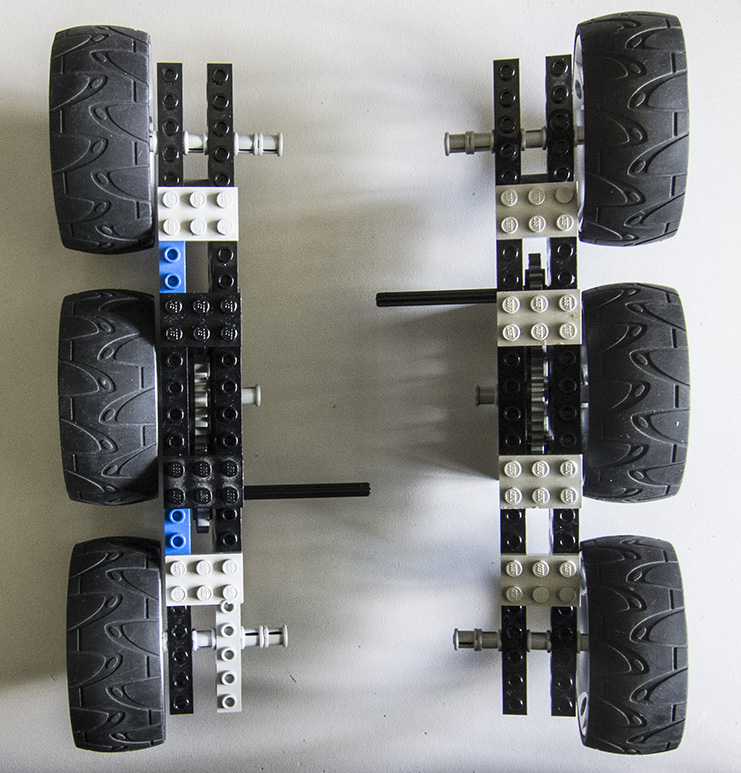
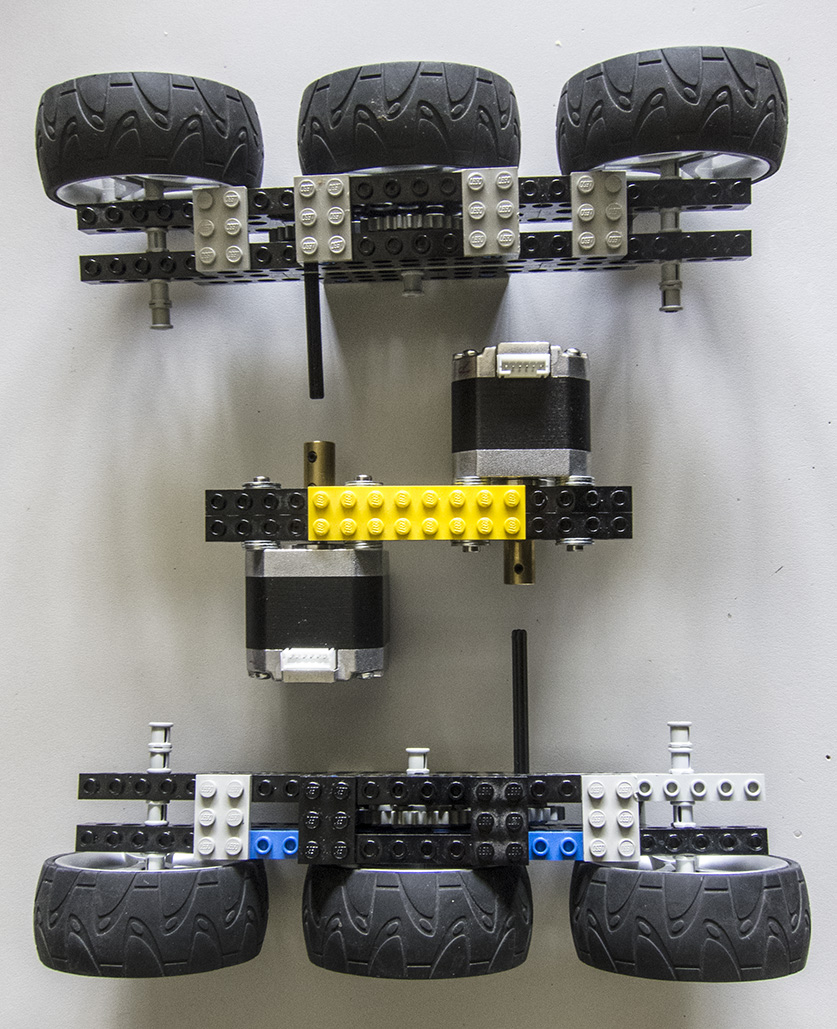
This is a bogie upside down
The stepper motors are large NEMA17 size, as the robot is very heavy (for a Lego bot). They are bolted to a central spine. This shows how they will line up.
Cross girders at the ends keep the whole thing rigid.
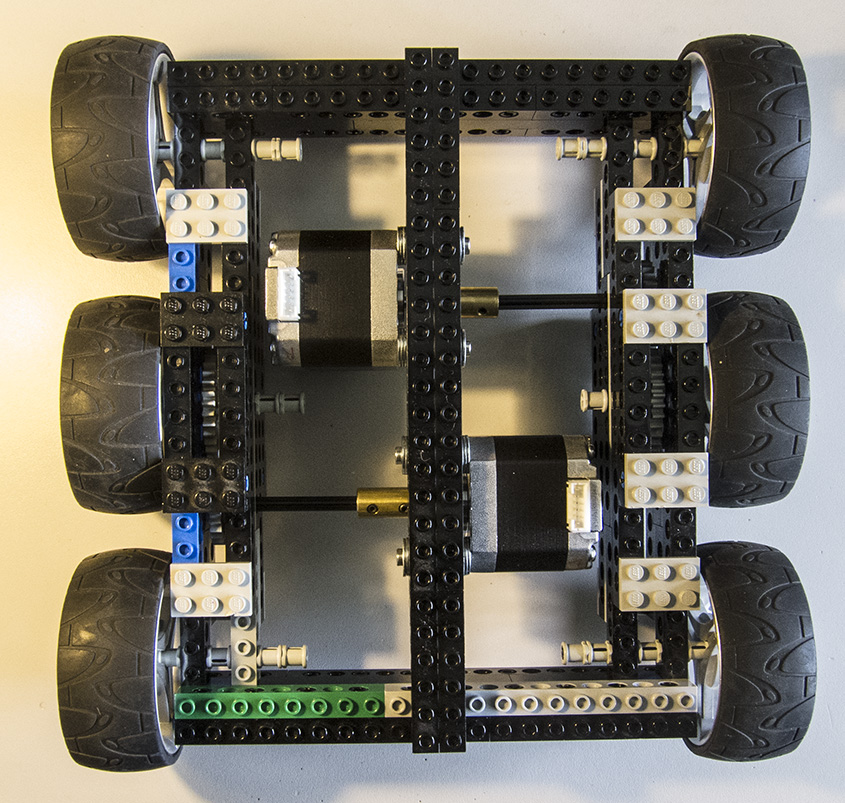
Here are the motors all connected up.
There are two alternative sweeping heads. This one is a floor broom.

This one is a window cleaning mop.

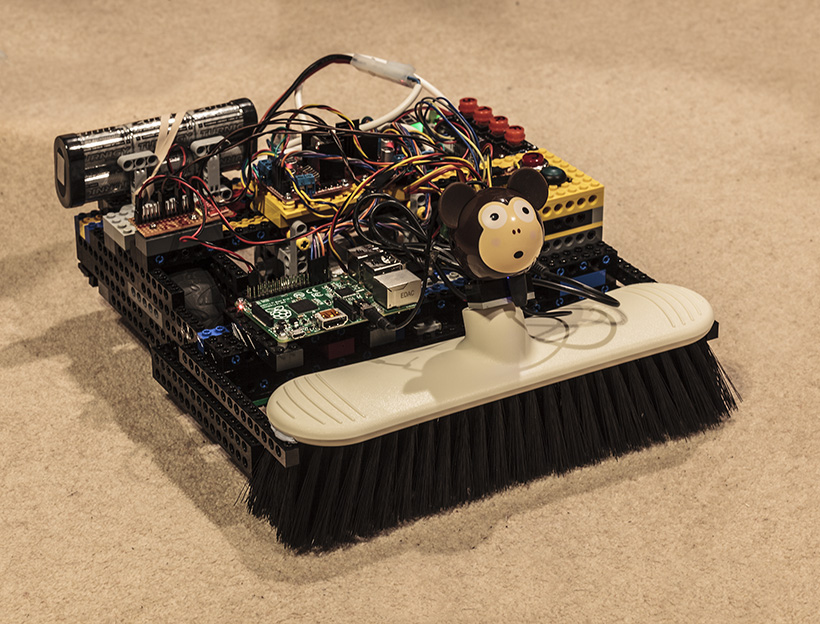
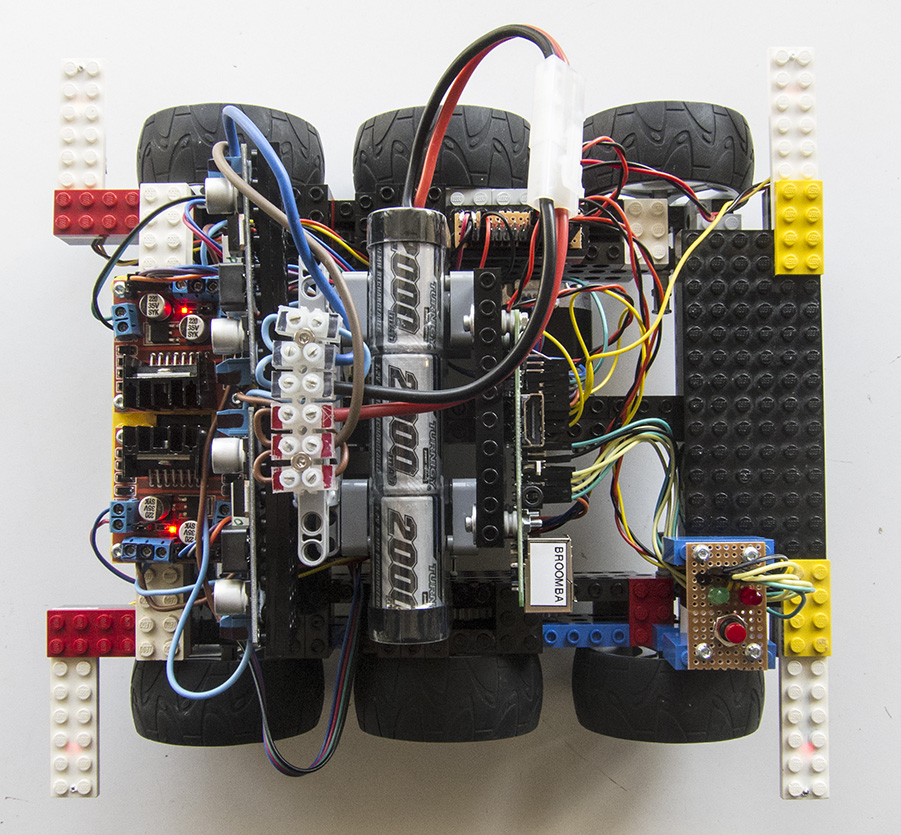
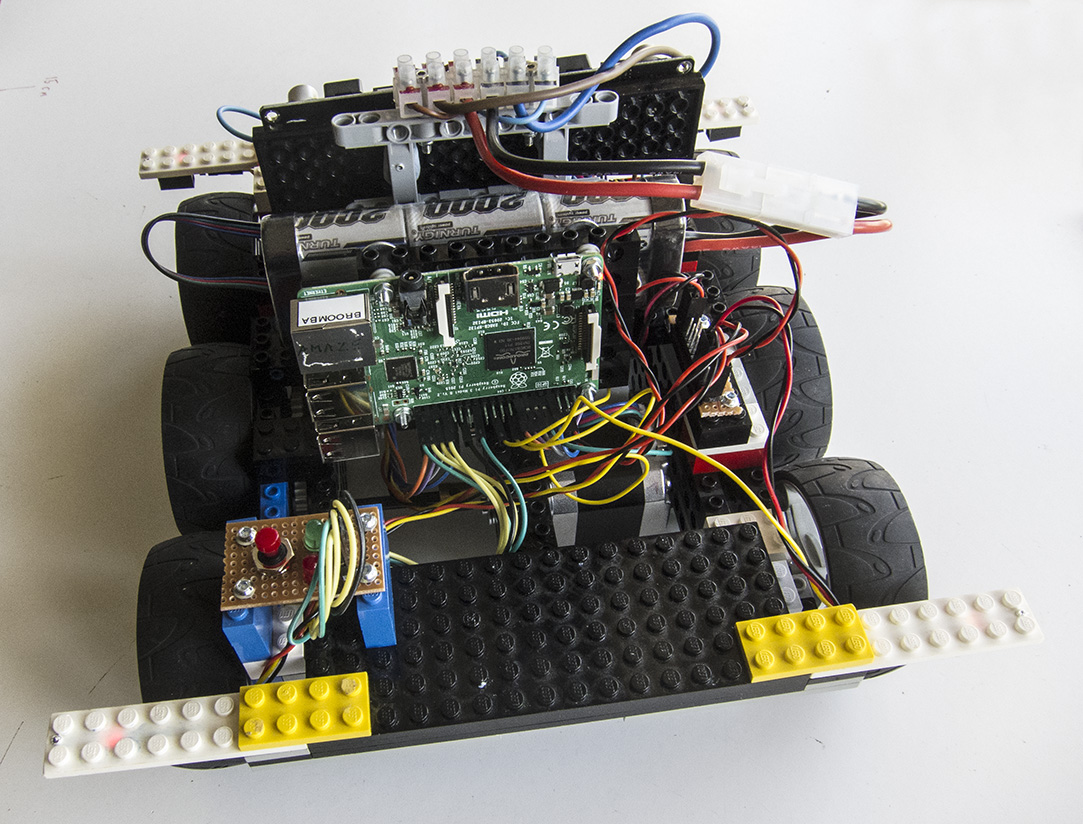
The electronics are, from left to right:
- two Pololu 5-10cm IR proximity sensors on outriggers. These detect the edge of the table while sweeping crumbs.
- a couple of L298N stepper drivers. Note the heatsinks. They deliver a lot of amps.
- two power supplies. One delivers 5 volts to the raspberry pi etc. The other delivers a nominal 6.5 volts to the motors via the stepper drivers. In practice this drops to 5.5 volts when they are working, which is good because the motors are rated at 4 volts, so they are getting a bit overdriven.
- nominal 7.4 volt battery
- Raspberry Pi
- Little bit of Vero board with a couple of LEDs on it and a button. The green LED indicates things are working; the red LED a fault condition. The red button starts the demo.
- two more Pololu 5-10cm IR proximity sensors on outriggers
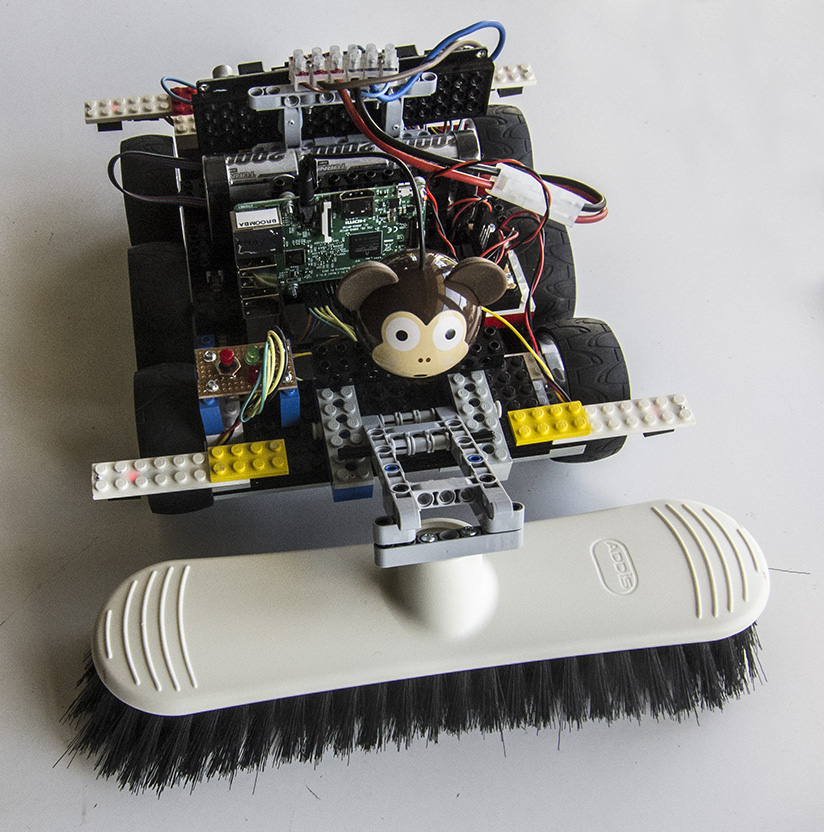
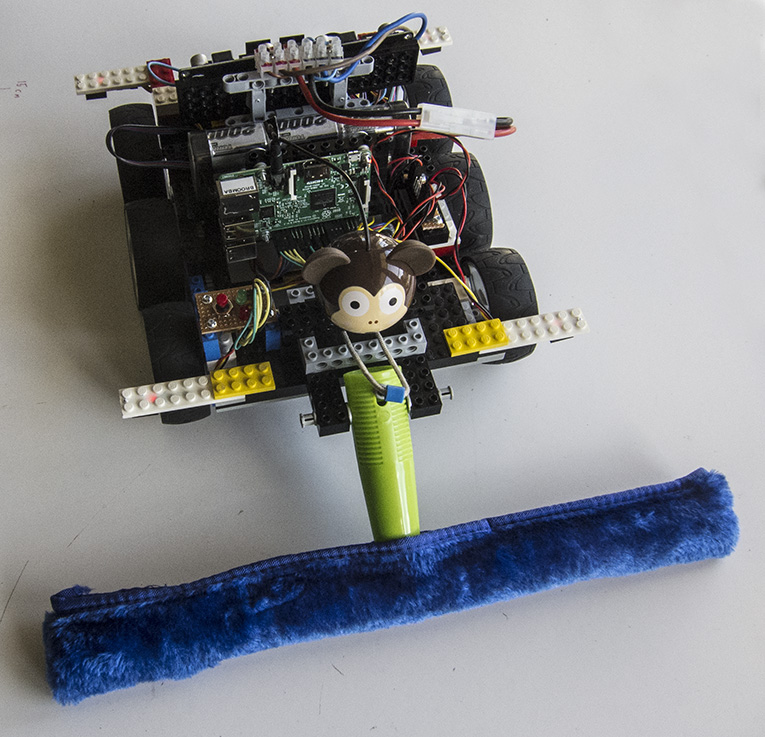
At the front of the robot is a platform to mount the brushes
This is the complete robot with the soft brush.
This is the complete robot with the hard brush.